⚙️云台接口与调参说明

🟡 声明:
因每种云台/伺服的控制速度与线性度不一样,
如您需要目标跟踪过程中对居中度有严格要求,
可提供独立的技术服务,我们将为您测试伺服性能并给出匹配伺服的专用参数。
整机类设备出厂时已经过初步参数调整,后期仅需根据实际场景进行微调。远距离跟踪建议采用无级变速协议,采用控制细分精度优于0.005°/S的指标。
本文仅限指导达到近似指标的调参。
1.通信接口
波特率: 9600 bps
接口: RS485 ,默认为RS485
云台PELCO-D ID号 :01
2.Pelco-D协议云台调参
各参数说明如下表。
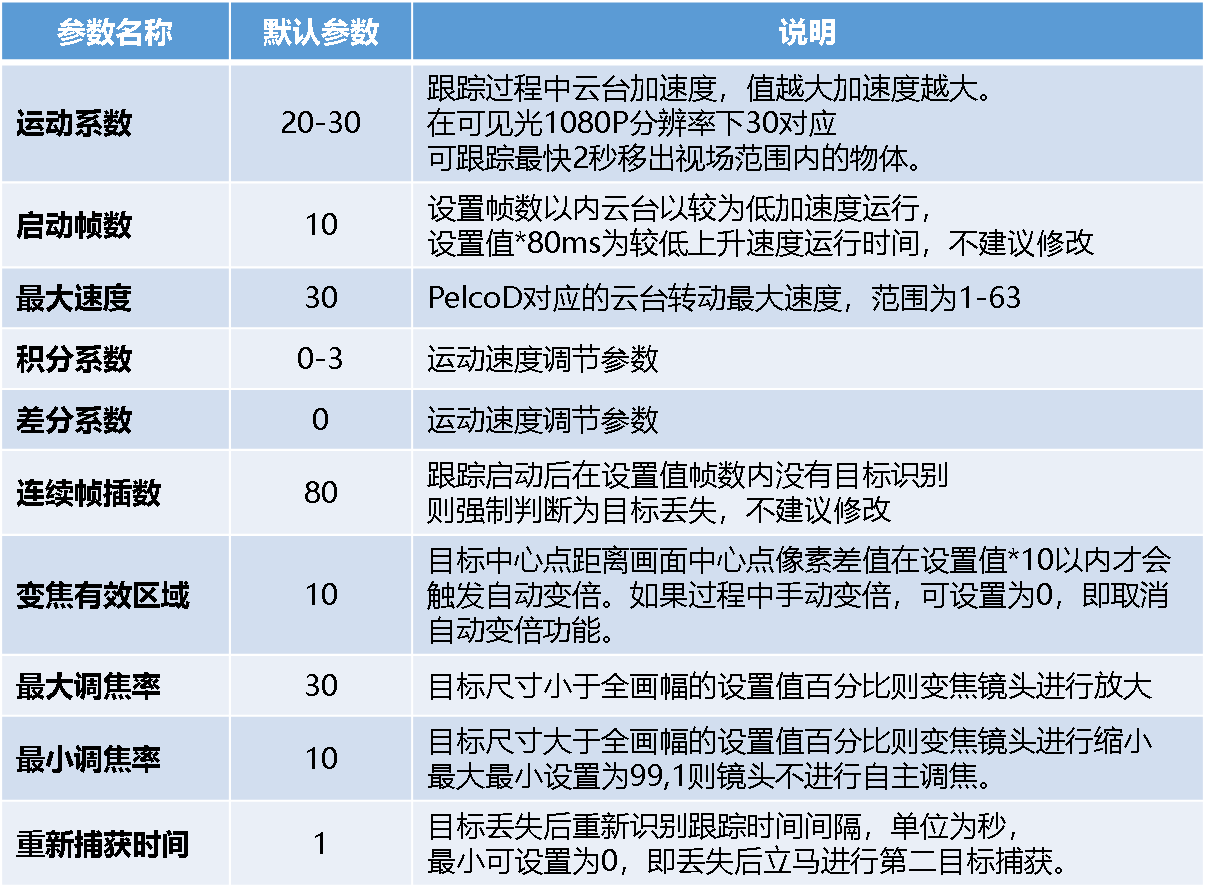
🟢 典型参数配置:
主要配置的参数为 运动系数、最大速度,差分系数,积分系数等四个参数,
其他参数均可使用默认参数,不匹配的参数会导致云台过冲或缓慢。
🟢 运动系数:
对于PelcoD协议的云台而言,速度等级为64个,运动系数一般配置成默认的20,如果云台为重载云台,PelcoD对应速度往往较低,可配置成30。根据实际云台速度情况进行上调或下调,建议不要超过30。
🟢 最大速度:
最大速度需要看云台速度对应表,建议配置成近似30度每秒对应的PelcoD速度等级或以下。
🟢 差分系数/积分系数:
不需要精调时可直接设置为 0 。根据实际云台居中程度,适当增加积分系数,限制在5以内。
建议使用非标Pelco-D高精度协议,若您的云台无法使用非标Pelco-D高精度协议,请尽量保障云台在不同速度配置值下速度响应是线性的。
部分小云台在速度等级10以下非线性很明显,即配置值10以下速度特别低,10以上速度增加明显,此时不利于跟踪速度配置。
为保障您的跟踪效果,建议联系云台厂家将PelcoD协议速度配置值与速度进行线性化处理。
3.随动设置
3.1 自动变焦
“自动变焦”按钮开启后跟踪过程中的镜头自动变焦功能将开启,
当目标在中心点的“变焦有效区域”×10像素范围内时自动变焦有效。
当目标占比画面百分比小于“最小调焦倍率”设定的值时镜头倍率放大,大于“最大调焦倍率”设定值时镜头倍率缩小。
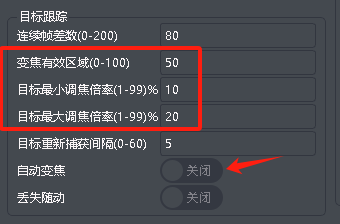
在小型无人机或鸟目标跟踪时建议将最小调焦倍率设置2,最大调焦倍率设置4。
部分无人机、鸟跟踪设备中最小调焦倍率,最大调焦倍率会用作 最小目标像素数量与最大目标像素数量,
以便获得更好的自动变焦效果。
此种模式下,目标像素小于最小目标像素数量时进行变倍+,大于最大目标像素数量时进行变倍-。
此模式下可见光建议最小调焦倍率设置30,最大调焦倍率设置80。
热红外最小调焦倍率设置5,最大调焦倍率设置20。
请留意变焦最大,最小范围在 7.其他配置参数-“自定义参数2”,“自定义参数3”设置的目标尺寸像素数范围内,
否则跟踪时会认为是假目标,导致丢失目标。
3.2 重新捕获间隔
“目标重新捕获间隔”为目标丢失后重新搜索时间,默认可以设定0,即在自动跟踪时丢失后立马重新捕获新目标开始跟踪,如果此数值大于0,在此时间内会维持原有运动速度并开始搜索周边目标,若限定时间内检测到目标后锁定并继续跟踪。
在开启“丢失随动”后,重新捕获间隔时间内会在上一次丢失目标附近进行目标搜索。
4.标准Pelco-D协议云台调参
Pelco-D协议下具体速度与云台本身速度配置有关。若您采购的是整机类设备,设备出厂前我们会采用独立的精调跟踪算法,标定好参数提供,以保障目标跟踪过程中的反应速度与居中度。
若您采购的是模块级产品,请用以下方式调参。建议使用线性速度关系的Pelco-D云台,以达到更好的目标居中度。
步骤如下:
1️⃣ 首先确保设备相机的倍率表已匹配好并导入的Tofu设备中,采用框选跟踪模式,在静态背景下设置最大速度为 63,即无限制状态,积分系数与差分系数均设置为0。
2️⃣ 运动系数以10为间隔,逐步往上增加,框选画面中边界物体与1/4画面物体进行跟踪。查看物体居中时间与超调状态。超调即框选目标达到中心位置后继续往偏离中心点方向运动的现象。有轻微超调时即可停止增加运动系数。
3️⃣ 增加积分系数调整目标居中情况,一般可设置为运动系数的1/10或1/20,非线性速度的云台请设置为0。
4️⃣ 最大速度可不做限制,设置63。云台速度是非线性的情况下限制到镜头1倍倍率下,2秒转动整个水平视场角的速度。
5️⃣ 差分系数默认设置0,Pelco-D协议不支持静态参数配置。
5.非标ExPelco-D协议云台调参
非标Pelco-D高精度协议下具体速度与运动控制细分速度有关。若您采购的是整机类设备,设备出厂前我们会采用独立的精调跟踪算法,标定好参数提供,以保障目标跟踪过程中的反应速度与居中度。
若您采购的是模块级产品,请用以下方式调参。
步骤如下:
1️⃣ 首先确保设备相机的倍率表已匹配好并导入的Tofu设备中,采用框选跟踪模式,在静态背景下设置最大速度为 65535,即无限制状态,积分系数与差分系数均设置为0。
2️⃣ 运动系数以100为间隔,逐步往上增加,框选画面中边界物体与1/4画面物体进行跟踪。查看物体居中时间与超调状态。超调即框选目标达到中心位置后继续往偏离中心点方向运动的现象。有轻微超调时即可停止增加运动系数。在速度细分不够小的情况时可降低运动系数增加间隔。
3️⃣ 增加积分系数调整目标居中情况,一般可设置为运动系数的1/10或1/20。
4️⃣ 最大速度限制到运动系数的3倍。
5️⃣ 差分系数用于精调静态参数的开启,默认设置0,关闭精调。
6️⃣ 若您想要达到优秀的跟踪居中度,并且采用的是第三方伺服,我们可为您提供独立的伺服精确调参技术服务。精确调参技术服务需要我们技术评估后远程操作或者客户提供实物设备,更换独立的精调跟踪算法,并经过参数标定后提供。此服务为一次性服务,同一种类伺服与镜头下无需重新标定。
注:非标Pelco-D高精度协议下的调参依据比PelcoD下的参数精度要求高,
Tofu系列云台相机产品会提供已配置好详细参数无需二次修改。
6.LPP无级变速协议云台调参
此时用到自定义参数区域。
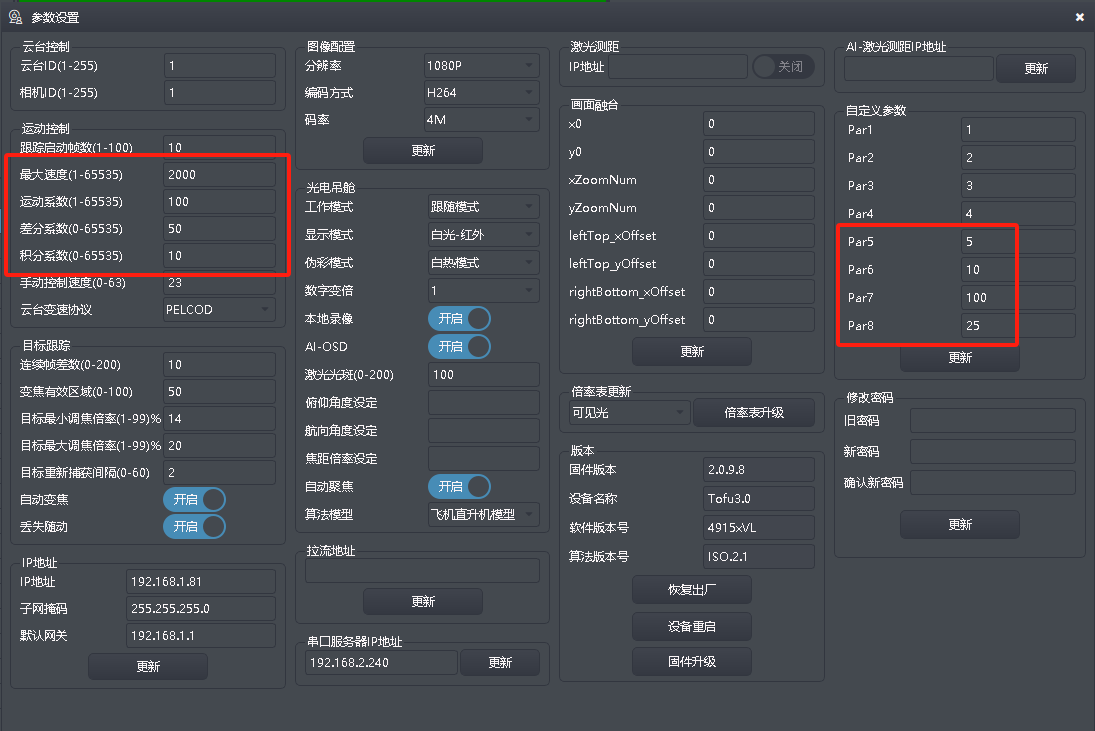
自定义参数一共为8个,精调过程仅用到 param5,6,7 三个自定义参数,请勿修改其他参数。
⚠️固件版本2.0.9.8的设备param5大于0,即为无极变速伺服控制模式,等于0是Pelco-D协议跟踪模式。
⚠️固件版本2.1.3.9的设备param5等于17,即为无极变速伺服控制模式,等于0是Pelco-D协议跟踪模式。
步骤如下:
1️⃣ 首先确保设备相机的倍率表已匹配好并导入的Tofu设备中,采用框选跟踪模式,在静态背景下设置最大速度为 65535,即无限制状态,差分系数设置为1000,运动系数与积分系数不用设置选默认,进入精调静态参数方式。param1请调整到0,即正常跟踪模式。
2️⃣ 框选跟踪模式下,镜头倍率调节至1倍。param4为云台在同等配置数值下的 (水平速度/垂直速度)*10.0 取整后的数值,具体数值由云台自身速度配置决定。后续保持固定数值即可。param4 详细说明见第7章节。
3️⃣ param6与param7以1:10比例,param7以100为间隔,逐步往上升,框选画面中边界物体与1/4画面物体进行跟踪,查看框选跟踪效果。设置好参数后需要点击 “更新” 生效。得到大致效果后可以以10作为间隔进行微调。
4️⃣ 当画面中框选物体在2秒以内可以居中,并且不会丢失跟踪时代表param7参数已经调整好。
5️⃣ 调整param6在 1/5 到 1/20范围内,在居中后产生震荡则调小,居中度不够则调大。
6️⃣ 以 0.01°细分的云台为例,param6和param7的经验值分别为 5,260;
以 0.001°细分的云台为例,param6和param7的经验值分别为 400,3600。
以上数据作为参考,镜头最大视场角不一样参数也会有区别。
7️⃣ 以上步骤调整好param6和param7后更新并保存参数。差分系数 调整至 0,即关闭静态参数。开始调动态参数。
动态参数建议在有运动目标的情况下调整,在静态场景中测试的参数可在运动目标下进行微调以更好的适应。
8️⃣ 运动系数以100为间隔,逐步往上增加,框选画面中边界物体与1/4画面物体进行跟踪。查看物体居中时间与超调状态。超调即框选目标达到中心位置后继续往偏离中心点方向运动的现象。有轻微超调时即可停止增加运动系数。在速度细分不够小的情况时可降低运动系数增加间隔。
运动系数一般与param7近似或略高。
9️⃣ 增加积分系数调整目标居中情况,一般可设置为运动系数的1/10或1/20。
🔟 差分系数更改为 50。若云台不带速度保护,可以自行设置最大速度,以免超过云台实际承载速度范围。一般设置为运动系数的10倍,若云台自带保护可以设置成65535,即无限速。
若您想要达到优秀的跟踪居中度,并且采用的是第三方伺服,我们可为您提供独立的伺服精确调参技术服务。精确调参技术服务需要我们技术评估后远程操作或者客户提供实物设备,更换独立的精调跟踪算法,并经过参数标定后提供。此服务为一次性服务,同一种类伺服与镜头下无需重新标定。
7.其他配置参数
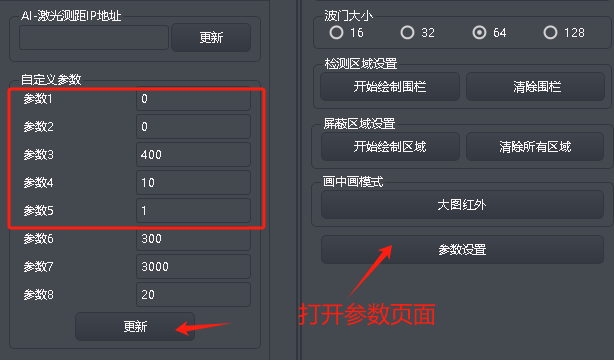
🟢 自定义参数1:
配置为1为小目标跟踪模式,配置为0是标准跟踪模式。无人机、鸟等目标请使用小目标模式。
整机产品中无人机、鸟目标跟踪会自动切换到小目标模式。识别跟踪模块产品用户需自行配置模式。
🟢 自定义参数2:
识别最小目标像素数量,目标像素小于此数值的会被屏蔽掉。默认配置0,即无限制最小。
🟢 自定义参数3:
识别最大目标像素数量,目标像素大于此数值的会被屏蔽掉。默认配置500,即500Pix以上的目标均被屏蔽掉。
🟢 自定义参数4:
单视频输入模式:
自定义参数列表中参数4代表 10 * 水平细分速度/垂直细分速度,默认为10,即水平细分速度与垂直细分速度相同,仅在两者差异较大时使用,请勿随意修改。
双视频输入模式:
定焦热红外与可见光的视场角一致时的可见光倍率值 * 10。如热红外的视场角与可见光3.2X变焦后的视场角一致,则输入32。
🟢 自定义参数5:
固件版本2.0.9.8的设备param5大于0,即为无极变速伺服控制模式,等于0是Pelco-D协议跟踪模式。
固件版本2.1.3.9的设备param5等于17,即为无极变速伺服控制模式,等于0是Pelco-D协议跟踪模式。
🟢 自定义参数6 ,7:
无级变速协议下的静态参数。详见上一章节调参说明。
🟢 自定义参数8:
识别阈值百分比。默认20,即高于20%置信度即认为是识别的目标。可根据自身场景进行调整。
